Robot Operating System (ROS) уже давно стал стандартом де-факто для разработки и управления роботами. Его мощные инструменты и гибкая архитектура позволяют создавать сложные робототехнические системы, взаимодействующие между собой через топики, сервисы и действия. Но несмотря на широкие возможности, управление роботами в ROS пока остаётся сложной задачей для новичков и требует глубокого понимания специфики системы. Именно в этой области появляется всё больше инновационных решений, направленных на упрощение взаимодействия человека с роботом. Одним из таких решений стал MCP сервер, разработанный специально для работы с ROS, который преобразует естественный язык пользователя в команды для роботов.
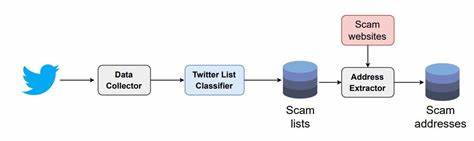
Такой подход кардинально меняет способ коммуникации с роботами и открывает новые горизонты для автоматизации и человеческо-машинного взаимодействия. MCP сервер для Robot Operating System — это полноценный инструмент, позволяющий управлять роботами в ROS-средах с помощью естественного языка. Он поддерживает работу с топиками, сервисами и действиями и может использоваться с любым типом сообщений ROS. Главный принцип работы сервера заключается в обработке введённых пользователем текстовых команд и их преобразовании в соответствующие команды ROS, что делает управление значительно проще и доступнее. Основными компонентами MCP сервера являются Socket Server и MCP Server.
Socket Server — это лёгкий сервер, работающий на локальной машине и обеспечивающий взаимодействие между графическим интерфейсом пользователя и MCP сервером через WebSocket. Он запускает такие инструменты, как Gazebo или rqt_graph, непосредственно на дисплее пользователя. MCP Server, реализованный на Python, обрабатывает естественный язык пользователя, преобразует его в команды ROS и координирует взаимодействие с Socket Server. Особое внимание уделено синхронизации, для чего требуется настройка одинакового ROS_DOMAIN_ID на всех устройствах, чтобы обеспечить беспроблемную коммуникацию между MCP сервером и локальной сетью. Функционал MCP сервера охватывает управление топиками ROS2: пользователь может просматривать, мониторить и публиковать сообщения в темы, а также управлять узлами системы, получать информацию о запущенных узлах и мониторить их состояние.
Интерфейс предлагает интеграцию с сервисами, позволяя вызывать сервисы ROS2 с пользовательскими параметрами, а с помощью поддержки действий ROS2 возможна постановка и контроль целей роботов. Кроме того, MCP сервер включает инструменты для отладки окружения ROS2, проверки его настроек и управления запущенными процессами, что повышает удобство работы и снижает вероятность ошибок. Одной из ключевых особенностей является возможность интеграции с графическими инструментами ROS2 через WebSocket сервер, что упрощает визуализацию данных и управление роботами. Такой мощный и универсальный набор функций делает MCP сервер прекрасным решением для специалистов и разработчиков, желающих использовать естественный язык для взаимодействия с роботами. Процесс установки MCP сервера требует определённых знаний и подготовки.
В первую очередь, необходима установленная система ROS2 Humble Hawksbill, поскольку на данный момент MCP сервер официально поддерживает только эту дистрибуцию. Помимо операционной системы Linux, можно использовать macOS или Windows. Важно также наличие Python версии 3.10 и выше, пакетного менеджера uv, а также установки внешних зависимостей, таких как websockets версии не ниже 15.0.
1. Установка начинается с клонирования репозитория проекта с GitHub, после чего следует установка необходимых Python-пакетов и активация виртуального окружения через uv. Настройка взаимодействия с Claude Desktop подразумевает корректную конфигурацию файла claude_desktop_config.json, где указываются пути к директориям проекта и значения ROS_DOMAIN_ID. Эта настройка позволяет запустить MCP сервер и Socket Server корректно и обеспечить их синхронную работу в локальной сети.
Управление MCP сервером следует начинать с активации виртуального окружения и запуска сервера с помощью uv. Socket Server запускается отдельно с помощью интерпретатора Python без активации виртуального окружения, что упрощает параллельное использование обеих систем. Демонстрационные возможности MCP сервера включают выполнение команд управления в симуляторе Gazebo с платформой TurtleBot3. Пользователь может с помощью естественного языка открыть эмулятор, управлять движением робота, вызывать перечень сервисов и даже отправлять команды для передвижения робота на определённое расстояние. Примером может служить команда, которая приводит к открытию симулятора Gazebo с TurtleBot3 и публикации сообщений в топик для перемещения робота.
Другой пример — запрос на вывод списка сервисов ROS и вызов команды для сброса мира в Gazebo. Также можно отправить действие для перемещения TurtleBot3 вперёд на один метр. Такой уровень взаимодействия показывает, насколько гибко и удобно можно работать с ROS при помощи MCP сервера. В целом, создание MCP сервера для Robot Operating System представляет собой важный прорыв в области робототехники, позволяющий упростить и расширить способы взаимодействия с роботами. Подобные технологии не только повышают удобство использования робототехнических систем, но и создают предпосылки для более широкого внедрения робототехники в повседневную жизнь и промышленность.





![[KH Explains] Korea yet to welcome spot crypto ETFs](/images/8D29E981-41BE-47DE-AD08-82C0B9018FCF)