Луна остаётся одним из главных объектов для освоения космоса человеком. Интенсивная разработка технологий и роботов позволяет учёным приступать к решению сложных задач, связанных с безопасным и глубоким исследованием её поверхности и внутреннего строения. Одним из самых перспективных направлений являются исследования лунных лавовых труб - древних подземных туннелей, образовавшихся в результате извержений вулканической лавы миллионы лет назад. Учёные считают, что такие структуры могут стать настоящим укрытием для будущих астронавтов, поскольку они обеспечивают защиту от опасных внешних условий, таких как космическое излучение, экстремальные перепады температуры и метеороиды. На данный момент эти подземные полости остаются практически неизученными из-за труднодоступности и опасностей, связанных с их исследованием.
Однако европейские исследователи сделали большой шаг вперёд, разработав комплекс из трёх роботов с разными функциями, которые способны совместно и автономно проводить разведку и картографирование лунных лавовых труб. Луна представляет собой экстремальную среду. Температура поверхности при дневном освещении поднимается до 121 градуса Цельсия, а ночью опускается до -146 градусов. При этом в некоторых её полярных регионах температура достигает -240 градусов Цельсия. Такие условия не только крайне враждебны для человека и оборудования, но и создают серьёзные вызовы для технологии консервации и работы устройств.
Кроме того, поверхность Луны постоянно подвергается бомбардировке микрометеоритами, которые движутся с высокой скоростью и способны повредить как оборудование, так и человеческое снаряжение. А атмосферы, которая могла бы защитить от подобных воздействий, на Луне нет. Всё это делает исследования особенно трудными и потенциально опасными. Лавовые трубы на Луне, обнаруженные с помощью орбитальных спутников, представляют собой естественные подземные тоннели, которые образовались в результате древних лавовых потоков. В некоторых местах потолки таких труб обрушились, образовав глубокие отверстия, известные как "скайлайты" - своеобразные люки на поверхность.
Именно через эти отверстия можно попасть внутрь лавовых труб, что делает их ключевыми точками для будущих исследований и возможного обустройства подземных баз. Уникальные природные укрытия, скрытые под поверхностью, могут обеспечить безопасные зоны для астронавтов, где их будут защищать от вредного излучения, экстремальной температуры и метеоритов. Для изучения этих структур европейские эксперты из Германского исследовательского центра по искусственному интеллекту (DFKI) разработали инновационную команду из трёх роботов с разной специализацией. Каждый из роботов выполняет уникальную задачу, создавая целостную систему экспертизы и разведки подземных пустот. Проект предлагает комплексный подход к освоению лавовых труб и может значительно продвинуть возможности исследования не только Луны, но и Марса, где также обнаружены подобные геологические образования.
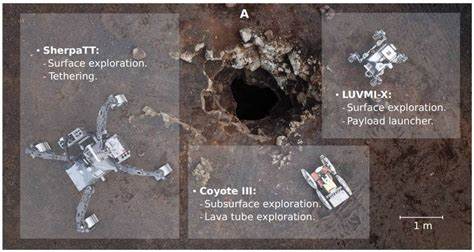
Первый робот, SherpaTT, отличается своей гибридной конструкцией - он оснащён как колёсами, так и ногами, что позволяет ему легко перемещаться по пересечённой и сложной лунной поверхности. Кроме прочего, он выполняет функцию опорного пункта при спуске второго робота в лавовую трубу, обеспечивая безопасность и устойчивость системы. SherpaTT вместе с легким и компактным роботом LUVMI-X исполняют первичные задачи картографирования окрестностей и входа в лавовую трубу, создавая точные трёхмерные модели поверхности вблизи скайлайта. Это важно для планирования последующих этапов разведки и выбора оптимального места для спуска в пещеру. LUVMI-X - это лёгкий и экономичный в производстве ровер, предназначенный для высокоточного картографирования и сбора данных на поверхности.
Он помогает создавать подробные цифровые модели поверхности, которые впоследствии позволяют безопасно и эффективно управлять остальными роботами и планировать маршрут исследовательской экспедиции. Третий член команды, Coyote III, представляет собой небольшой, манёвренный робот, способный самостоятельно спускаться в лавовые трубы, используя систему тросов, закреплённую на SherpaTT. После спуска Coyote III приступает к внутреннему исследованию лавовой трубы, преодолевая сложный и неровный ландшафт, и выполняет трёхмерное сканирование подземного пространства. Благодаря высококачественным датчикам и камерам, этот ровер собирает данные для создания подробных моделей внутреннего строения труб, а также выявляет потенциально опасные участки и интересные объекты. Испытания всей системы проходили на острове Лансароте - вулканической территории Канарских островов, поверхность которой по своим характеристикам напоминает лунный ландшафт.
В феврале 2023 года команда успешно протестировала четыре ключевых этапа миссии. Сначала SherpaTT и LUVMI-X совместно создали цифровую карту скайлайта и окружающей местности. Далее LUVMI-X сбросил в лавовую трубу специальный сенсорный модуль - небольшой куб с камерами высокого разрешения, который выполнял оценку внутреннего пространства и создавал его первые визуализации в 3D. После этого Coyote III был аккуратно спущен в лавовую трубу, используя телемеханическую систему и являясь неподвижным на инерцию к различным повреждениям. В заключительном этапе работы ровер успешно исследовал и картографировал внутреннюю часть трубы, преодолевая сложные участки и передавая данные на поверхность.
Несмотря на некоторые ограничения в манёвренности, в частности сложности с разворотом на узких каменистых участках, миссия показала высокую эффективность всех компонентов. Этот комплексный подход использования гетерогенной автономной системы роботов стал важным шагом в подготовке реальных экспедиций на Луну и в дальнейшие космические миссии. Рассматривая применение технологии на Луне и Марсе, специалисты подчёркивают важность подобных исследований для долгосрочной защиты астронавтов и защиты инженерных сооружений от космических угроз. Такие исследования также способствуют поиску следов жизни, особенно на Марсе, где лавовые трубы могут создавать микросреду с повышенной вероятностью сохранения биологических признаков. В последние годы лавовые трубы рассматриваются не только как объекты исследования, но и как потенциальные места для строительства долговременных лунных баз.
Естественное укрытие от космического излучения, микрометеоритов, суровых температур и пылевых бурь делает эти объекты особенно ценными. Автономные роботы, способные эффективно посещать и сканировать эти структуры, обеспечивают подготовку и обеспечение безопасности этих программ. Дальнейшие усовершенствования данного роботизированного комплекса направлены на повышение автономности, манёвренности и устойчивости оборудования к экстремальным условиям. Помимо повышения надёжности и функционала, ведётся работа по снижению массы и стоимости роботов для обеспечения возможности массового использования и масштабных исследований. Таким образом, европейская разработка трёх роботов для исследования лунных лавовых труб открывает новые горизонты в освоении Луны и других планет.
Эта инновационная система способна решать задачи не только разведки и картографирования, но и создания фундаментальной базы для будущих человеческих поселений в космосе. Разработка и испытания подтверждают эффективность комплексного подхода, сочетающего разные технологии и методы передвижения, позволяющего максимально полно использовать возможности каждого участника команды. Исследование лавовых труб является важным этапом подготовки к устойчивой космической экспансии и открывает перспективы для новых научных открытий, обеспечения безопасности полётов и создания комфортных условий для будущих астронавтов. Продолжающаяся работа над этой технологией в ближайшие годы может значительно приблизить момент, когда колонизация и изучение Луны и Марса станут повседневной частью космических программ человечества. .