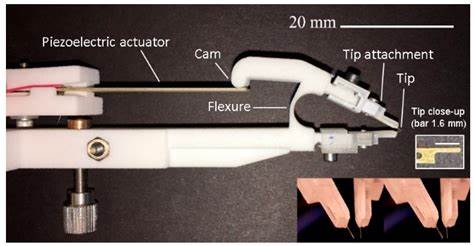
Современные технологии стремительно развиваются, открывая новые горизонты для точных и доступных инженерных решений. Одним из таких прорывных устройств является 3D-печатный флексурный микроманипулятор, который сочетает в себе высокую точность позиционирования с доступной стоимостью и удобством изготовления. Благодаря своей конструкции и использованию инновационных методов производства данный микроманипулятор находит применение в самых разных областях, от оптической калибровки до микроэлектронных исследований и микроскопии. Флексурный микроманипулятор представляет собой устройство, позволяющее добиться перемещений с микронной точностью в трех измерениях – XYZ. Основная особенность такого устройства заключается в параллельной кинематической структуре и встроенных гибких элементах – флексурах.
Флексуры – это тонкие гибкие участки конструкции, которые заменяют традиционные шарниры и подшипники, обеспечивая высокую точность движений за счет отсутствия трения и люфта. Традиционные механические системы позиционирования часто страдают от износа, люфта и необходимости регулярной калибровки. В отличие от них, флексурные механизмы демонстрируют высокую жесткость и повторяемость, что особенно важно для приложений, требующих высокой точности и надежности. В данном проекте использована архитектура, заимствованная и улучшенная на основе известного решения OpenFlexure Block Stage, что гарантирует надежность и успешное применение технологии. Одним из ключевых преимуществ микроманипулятора является его доступность.
Благодаря использованию технологий 3D-печати и материалов вроде PLA, устройство можно изготовить самостоятельно в домашних или лабораторных условиях без необходимости в сложном оборудовании. Это значительно расширяет круг потенциальных пользователей, включая студентов, исследователей и инженеров с ограниченным бюджетом. Все CAD-модели микроманипулятора разработаны в популярной и бесплатной системе FreeCAD, что позволяет не только использовать готовые решения, но и модифицировать их под конкретные задачи. Открытое программное обеспечение и доступные чертежи стимулируют сообщество к развитию и улучшению проекта, обеспечивая постоянный приток идей и нововведений. Процесс 3D-печати оптимизирован под стандартные настройки и общедоступные принтеры с соплом 0.
4 мм, что обеспечивает баланс между качеством и скоростью печати. Важные элементы, такие как WireMount и FlexureStiffener, для достижения оптимальной прочности и точности рекомендуется печатать с уменьшенной скоростью и слоем в 0.1 мм, что снижает вероятность дефектов и повышает долговечность деталей. Остальные части можно печатать стандартными параметрами, что делает сборку максимально простой и доступной. Эффективность работы микроманипулятора подтверждается многими примерами использования.
В оптике его применяют для точной подстройки оптических компонентов, например, волоконных соединителей и лазерных систем. Благодаря высокой жесткости и минимальному люфту устройство обеспечивает стабильное и повторяемое позиционирование, критичное при настройке высокоточных оптических приборов. В сфере микроэлектроники микроманипулятор необходим для исследования и тестирования мелких компонентов, монтажа и пайки микросхем, а также для точного позиционирования щупов тестового оборудования. Компактность и отсутствие сложных движущихся частей делают устройство особенно удобным для лабораторных условий, где важна чистота и надежность измерений. Не менее актуален микроманипулятор и в микроскопии, где с помощью него осуществляют перемещение образцов или микроскопических инструментов с точностью до долей микрометра.
Это значительно повышает качество визуализации и возможность проведения детальных исследований, особенно в биологических и медицинских лабораториях. Уникальность устройства заключается и в его конструктивных решениях. Параллельная кинематическая структура обеспечивает равномерное распределение механических нагрузок и высокую жесткость, что положительно сказывается на стабильности и точности перемещений. Интегрированные флексуры сводят к минимуму трение и износ, что традиционно ограничивает срок службы класических механизмов. Дополнительно проект предусматривает возможность адаптации и расширения благодаря разнообразию насадок и элементов, которые легко менять.
Это расширяет область применения прибора, позволяя создавать грипперы, держатели и другие специальные устройства, необходимые для конкретных задач. Активное развитие проекта находится и в сообществе, где каждый может внести свой вклад. Планы на будущее включают разработку CAD-моделей в дюймовой системе измерений, улучшение механизмов преднатяга для резиновых уплотнителей и создание методов для точного закрепления регулирующих колес без люфта. Такая открытость способствует постоянному росту качества и функциональности микроманипулятора. Несмотря на свою простоту и доступность, 3D-печатный флексурный микроманипулятор демонстрирует возможности, которые ранее были доступны только для гораздо более дорогостоящих решений профессионального уровня.
Это делает его незаменимым инструментом для исследовательских лабораторий, учебных заведений и даже небольших производств, где необходима высокая точность и автономность. В заключение, 3D-печатный флексурный микроманипулятор является примером того, как инновации в области 3D-печати и открытых инженерных разработок могут привести к созданию доступных и высокоточных устройств. Его универсальность, надежность и возможность адаптации открывают огромные перспективы для различных научных и прикладных направлений, позволяя осуществлять высокоточные настройки и измерения с минимальными затратами.