Современные технологии искусственного интеллекта стремительно меняют жизнь людей с ограниченными возможностями, в частности слепых и слабо вижущих пользователей. Одним из ключевых вызовов для этой категории населения остается проблема безопасной и уверенной навигации в незнакомой местности. Часто при планировании путешествий или повседневных перемещений по новым маршрутам возникает ощущение неопределенности из-за отсутствия подробной информации о физическом окружении. В ответ на эту потребность исследователи и инженеры разрабатывают инновационные решения, способные расширить доступ к визуальным данным посредством использования уличных панорам, известных как Street View. Однако традиционные сервисы и средства, предоставляющие навигационные инструкции, чаще ориентируются на голосовые подсказки и ориентиры, оставляя неподкрепленным визуальный контекст, который так важен для полноценного понимания пространства.
Проект SceneScout, представленный в исследовании ведущих специалистов Гаурава Джейна, Лии Финдлейтер и Коул Глиссона, предлагает прорывной подход к этой проблеме. В его основе лежит использование мультимодальной большой языковой модели (MLLM), которая выступает в роли интеллектуального агента, способного интерпретировать и озвучивать содержание уличных панорам для слепых пользователей. Такой инструмент открывает возможность для более глубокого знакомства с маршрутом и окружением еще на этапе подготовки к путешествию, а также для свободного виртуального исследования улиц и городской среды. Система SceneScout функционирует в двух ключевых режимах, каждый из которых учитывает различные потребности пользователей. Режим предварительного просмотра маршрута (: Route Preview) обеспечивает доступ к детализированным описаниям объектов, которые встречаются на пути, позволяя людям с нарушениями зрения сформировать ментальную карту окружения.
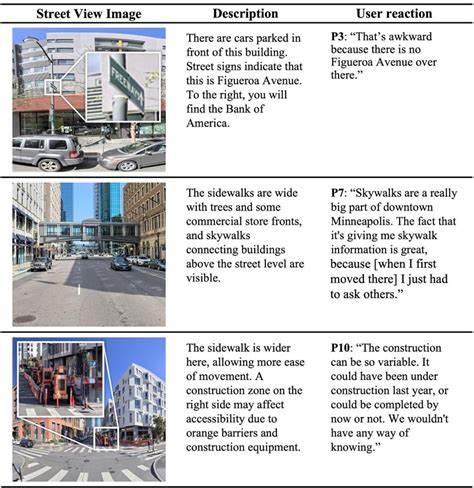
Пользователь может осмыслить, какие здания, дорожные элементы, магазины и другие важные объекты будут встречаться, что существенно снижает страх неопределенности и повышает уверенность в самостоятельном передвижении. Второй режим (: Virtual Exploration) предлагает гораздо более свободный формат взаимодействия с картой — пользователь может самостоятельно выбирать направление и «перемещаться» по панорамам, получая описания и контекст, благодаря которому создается полноценное представление о местности. Ключевым аспектом реализации SceneScout является точность и надежность предоставляемой информации. Проведенные исследования с участием реальных пользователей подтвердили, что 72% описаний были точны, а 95% затрагиваемых визуальных объектов оставались стабильными даже в случае использования более старых снимков улиц. Это важно, поскольку информация такого рода не должна вводить в заблуждение или создавать ложное чувство безопасности.
В то же время команда разработчиков отмечает наличие некоторых тонких и правдоподобных ошибок, которые сложно выявить без возможности визуальной проверки. Эти ограничения подчёркивают необходимость дальнейшего совершенствования моделей искусственного интеллекта и интеграции дополнительных источников информации для повышения качества и достоверности сервисов. Применение технологии SceneScout и подобных решений коренным образом меняет ландшафт доступных технологий для людей с нарушениями зрения. Вместо прежних инструментов, фокусирующихся на голосовых подсказках и простейших ориентирах, пользователи получают возможность полного погружения в окружающую среду даже на расстоянии — планируя маршруты, изучая городские пространства и ощущая большую свободу в передвижении. Такой прогресс важен не только для повышения автономии, но и для улучшения психологического состояния пользователей, снижая тревожность и страх, связанные с путешествиями в незнакомой обстановке.
Важность интеграции искусственного интеллекта в сферу доступности подтверждается ростом числа проектов и исследований, направленных на разработку технологий для слепых и слабовидящих. Иммерсивные аудиовизуальные модели, мультимодальный анализ данных и современные методы машинного обучения становятся залогом появления новых инструментов, способных серьезно повысить качество жизни людей с ограничениями по зрению. Вместе с этим, специалисты акцентируют внимание на вызовах, связанных с созданием этичных, конфиденциальных и надежных систем. Важно найти баланс между технологическим прогрессом и уважением к правам и особенностям пользователей. Еще одним аспектом развития подобного рода решений является взаимодействие с существующими картографическими сервисами и базами данных.
Уличные панорамы, как правило, содержат огромный массив информации, из которого можно извлечь важные детали — архитектурные особенности зданий, дорожные знаки, пешеходные переходы, магазины и многое другое. Искусственный интеллект имеет потенциал существенно расширить возможности обработки и интерпретации этих данных, создавая индивидуальные, адаптированные к нуждам пользователя описания. Такой подход способствует тому, чтобы навигационные системы становились не просто функциональными, а по-настоящему персонализированными, учитывающими разнообразие потребностей. Технология не стоит на месте, и в обозримом будущем можно ожидать появления новых функций, улучшающих взаимодействие слепых пользователей с цифровыми пространствами. Например, возможность взаимодействия с AI-агентом на естественном языке, спрашивая уточнения или указания, интеграция с устройствами дополненной реальности, автоматическое обновление данных и повышение качества аудиовизуальных описаний.
Все это создаст основу для более глубокой цифровой инклюзии и расширит горизонты социальной и профессиональной активности людей с нарушениями зрения. Таким образом, SceneScout и аналогичные решения свидетельствуют о том, что будущее доступности существенно зависит от синергии искусственного интеллекта, языковых технологий и картографических данных. Они прокладывают путь к миру, где ограниченность зрения перестает быть серьезным препятствием для самостоятельности и активного образа жизни. Продолжая исследования и совершенствовать инструменты, общество приближается к созданию среды, в которой каждый сможет свободно перемещаться, исследовать и взаимодействовать с окружающим пространством наравне с остальными. Преодоление барьеров, связанных с восприятием навигационной информации, еще недавно казалось непростой задачей.