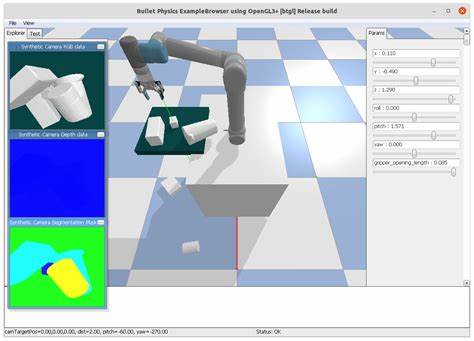
Современные технологии робототехники стремительно развиваются, предоставляя всё новые возможности для автоматизации процессов в промышленности и науке. Одной из ключевых задач, стоящих перед инженерами и исследователями, является эффективное захватывание и размещение объектов с высокой точностью и надежностью. Для отработки таких навыков часто используются эммуляции и симуляции, позволяющие тестировать алгоритмы без риска повредить дорогостоящее оборудование. Одним из таких уникальных решений является симуляция робота UR5 с захватом Robotiq 85 в физическом движке PyBullet, который позволяет реализовать интеллектуальное управление роботизированным манипулятором и обеспечить его взаимодействие с объектами в виртуальном пространстве. UR5 от Universal Robots заслуженно считается одним из наиболее универсальных и востребованных индустриальных роботов благодаря своей гибкости, простоте программирования и точности.
Этот многосовестный роботизированный манипулятор широко применяется в мелкосерийных производствах и лабораториях для выполнения разнообразных задач — от сборки компонентов до тестирования. В сочетании с двухпальцевым захватом Robotiq 85 UR5 способен выполнять сложные операции по захвату и перемещению объектов различных форм и размеров. Виртуальная среда PyBullet, являющаяся свободным и открытым физическим движком, предоставляет полноценные средства для моделирования физических взаимодействий, динамики сил и кинематики роботов. В сочетании с возможностями трехмерного графического интерфейса PyBullet GUI, эта платформа становится мощным инструментом для разработки и тестирования алгоритмов управления робототехникой. Суть проекта заключается в возможности автономного захвата и размещения объектов, представленных в виде кубов, расположенных на случайных позициях в ограниченной области.
Использование обратной кинематики (IK) позволяет роботу вычислять и достигать оптимальные положения суставов для выполнения конкретных задач — например, поднести захват к нужному объекту, захватить его и перенести на подставку. Одной из важнейших особенностей симуляции является реалистичная имитация работы захвата Robotiq 85. Благодаря скоординированному управлению суставами захвата обеспечивается плавное и точное открытие и закрытие «пальцев», что значительно повышает качество взаимодействия с объектами и снижает вероятность их повреждения. Согласованное управление также помогает удерживать предметы различного размера и формы, что особенно актуально для реальных производственных линий. Динамическое размещение кубов в виртуальной среде добавляет «живости» процессу — робот программно не знает заранее, где именно окажется тот или иной объект, что делает моделирование максимально приближенным к реальным условиям.
Такая постановка позволяет тестировать адаптивность алгоритмов захвата и реакцию системы на неожиданности, создавая дополнительный уровень сложности. Открытый исходный код проекта доступен на GitHub, что делает его ценным ресурсом для разработчиков, исследователей и студентов, желающих изучать принципы робототехнического программирования и управления. Пользователи могут запускать симуляцию через простой интерфейс командной строки, наблюдая в реальном времени поведение виртуального робота посредством PyBullet GUI. Это не только повышает уровень понимания механики взаимодействия, но и помогает выявлять и устранять ошибки на ранних этапах разработки. Существует большое число применений подобной симуляции.
Среди них обучение и отработка навыков работы с мехатронными системами, экспериментирование с алгоритмами управления без необходимости эксплуатации дорогого оборудования, а также подготовка моделей для промышленного внедрения робототехнических комплексов. Кроме того, симулятор служит отличной учебной площадкой для студентов и исследователей, позволяя им изучать и тестировать различные сценарии захвата и перемещения предметов, что крайне полезно в области автоматизации и искусственного интеллекта. Стоит отметить, что использование такого рода симуляций помогает значительно сократить временные и финансовые затраты на проектирование и отлаживание роботов. Вместо длительных проб и ошибок в физическом мире все доработки можно провести в виртуальной среде с полным контролем над набором условий и параметров. Это делает процесс разработки быстрее, качественнее и безопаснее.
В целом, симуляция UR5 с захватом Robotiq 85 в среде PyBullet открывает широкие возможности для моделирования сложных производственных и научных процессов в области робототехники. Это мощный инструмент для обучения, тестирования и разработки новых алгоритмов и технологий, предоставляющий наглядную и интерактивную платформу для взаимодействия с искусственным интеллектом и мехатронными системами. Проект сочетает в себе передовые методы управления роботами, инновационную механику захвата и удобный пользовательский интерфейс. Использование обратной кинематики для точного контроля движений, синхронизация работы суставов захвата и динамическое размещение объектов в комбинации обеспечивают высокую реалистичность и функциональность симуляции. Это способствует не только повышению уровня знаний и навыков разработчиков, но и развитию всей отрасли в целом.
Таким образом, развитие таких симуляторов имеет огромное значение для будущего робототехники, помогая создавать умные, адаптивные и эффективные роботизированные системы, способные выполнять сложнейшие задачи в различных сферах жизни и производства. Проект по симуляции UR5 с Robotiq 85 в PyBullet показывает, как современные технологии могут быть объединены для создания инновационных решений и расширения границ робототехнических возможностей.





![List of Goods Produced by Child or Forced Labor [pdf]](/images/74B4A89B-EAB0-4AEE-B62A-C3C95514E1CC)