Современный транспортный рынок переживает трансформацию под влиянием экологических тенденций и новых технологий. Появление электромобилей, популяризация совместных поездок и активное развитие общественного транспорта требуют от навигационных систем более точных и адаптивных решений. Google Maps, стремясь улучшить опыт пользователей, запустил инновационную функцию — прогнозирование времени прибытия (ETA) специально для дорог с полосами высокого уровня занятости (HOV). Это нововведение учитывает особенности движения на выделенных полосах для автомобилей с несколькими пассажирами, значительно повышая точность маршрутов и планирования поездок. Полосы HOV предназначены для облегчения потока транспорта в часы пик, предлагая преимущество водителям, которые едут с попутчиками.
Эти полосы, как правило, менее загружены, что позволяет двигаться быстрее, чем по общим полосам. Например, в Долине Солт-Лейк в штате Юта средняя скорость движения по HOV-полосам составляет около 68 миль в час, что примерно на 16% превышает скорость на обычных полосах. Такие особенности сделали необходимым создание специализированной системы прогнозирования времени, которая учитывает различные условия и динамику движения в этих зонах. Разработка новой модели ETA для HOV-полос послужила ответом на сложности, связанные с различием в поведении транспортных потоков. Google подошел к задаче с использованием передовых методов машинного обучения и анализа данных.
Прежде всего, специалисты собрали и проанализировали агрегированные и анонимизированные данные о движении транспорта, чтобы выявить характерные паттерны передвижения по HOV-полосам в сравнении с обычными дорогами. Определение поездок по HOV-полосам не является тривиальной задачей. Традиционные методы, основанные на анализе скорости, часто не дают однозначных результатов, особенно при низкой загруженности дорог. Для повышения точности команда Google применила подход без применения предварительных меток, то есть без четкого разграничения поездок как HOV или не-HOV на начальном этапе. Такой метод называется неконтролируемым обучением или кластеризацией, который анализирует множество параметров и выделяет характерные группы на основе внутренней структуры данных.
Ключевым элементом в этой системе стали сегментные классификации. Каждая поездка разбивалась на элементы, проходящие по определенным дорожным участкам с наличием HOV-полос. Для каждого сегмента собиралась статистика о скоростях и расстоянии относительно центра дороги в течение короткого временного интервала, например, 15 минут. Анализ этих данных позволял соотносить поведение транспортных средств с вероятным использованием HOV-полос. Особое внимание уделялось распределению скоростей.
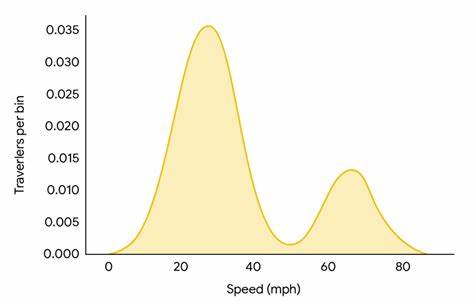
В период пиковых нагрузок часто наблюдается бимодальное распределение — появляется два отчетливых пика скорости, один соответствует HOV-полосам, где транспорт движется быстрее, и другой — общим полосам с более медленной езды. Эти паттерны, обозначенные как Сценарий А, показывают четкое разделение потока. В то же время существовали ситуации с менее выраженной разницей в скоростях — Сценарий Б, когда преимущество HOV-полос менее очевидно, что усложняло задачу классификации. Помимо скорости, важным фактором стала оценка латерального расстояния транспортного средства от центра дороги. Несмотря на то, что GPS-данные по своей природе обладают некоторой погрешностью, эта информация помогала различать автомобили, движущиеся в специально выделенных полосах, и тех, кто находится в соседних полосах.
Совмещение нескольких признаков позволило увеличить точность модели и повысить надежность классификации сегментов. Оригинальность метода также состояла в использовании временного аспекта при кластеризации. Весовой медианный подход учитывал близость временных интервалов, отдавая приоритет свежим данным для более актуального анализа дорожной ситуации. Важным было также использование мягких кластеров (soft clustering), где каждое наблюдение оценивалось с точки зрения вероятности принадлежности к тому или иному классу, а не жестко относилось к одному. Это позволило обработать неоднозначные данные и повысить гибкость алгоритма.
Заключительный этап включал агрегацию сегментных результатов для всего маршрута. Для того чтобы дать итоговую оценку, определялось, какую долю поездки водитель провел на HOV-полосах. Альтернативу давал подход «смеси экспертов», где несколько классификаторов с разными настройками и параметрами влияли на окончательное решение путем голосования. Такой ансамблевый метод существенно повысил устойчивость и точность предсказаний. Для оценки качества новой системы ETA были проведены обширные эксперименты.
Тестирование осуществлялось на обширных дорожных участках с разной длиной и характеристиками трафика. Анализировались распределения времени поездок с учетом данных о том, ездили ли автомобилисты по HOV-полосам или нет. Использование статистических методов, таких как расчет z-значений, позволило настроить автоматическую разметку и проверить соответствие прогнозов реальному поведению транспорта. Результаты внедрения новой модели превзошли ожидания. По сравнению с устаревшей системой, точность прогнозов времени прибытия для поездок по HOV-полосам улучшилась на 75%.
Это значительно повысило качество навигации для большой группы пользователей, которым доступны данные маршруты. Итоговый метод дал преимущество в 18% по сравнению с первоначальными версиями, которые ориентировались лишь на скорость без учета дополнительных признаков. Подход Google демонстрирует широкие перспективы для дальнейших исследований и приложений в области анализа дорожных данных. Использование сочетания кластеризации, анализа пространственных и временных признаков, а также ансамблевых моделей предоставляет эффективный инструментарий для решения сложных задач, связанных с транспортными потоками и их прогнозированием. Кроме того, концепции, заложенные в этом проекте, могут быть адаптированы для других видов транспорта, например, для зон с интенсивным движением двухколесных транспортных средств.




![The Kraken Revealed [video]](/images/ED58CC43-BEEA-46DB-9DDA-BEDB633893B2)


