Мир робототехники постоянно развивается, и современные разработчики ищут новые способы повысить эффективность, безопасность и гибкость своих приложений. Одним из ключевых направлений в этой области является интеграция мощных языков программирования с системами робототехнической операционной системы. Именно здесь особое внимание уделяется Rust и ROS (Robot Operating System), а также концепции динамической типизации, позволяющей значительно упростить взаимодействие между различными компонентами робототехнических систем. Rust зарекомендовал себя как современный язык программирования, который сочетает в себе высокую производительность и безопасность памяти без компромиссов. Это особенно актуально для приложений в сфере робототехники, где надежность и стабильность критичны, а производительность зачастую решает, насколько эффективно функционирует система в целом.
ROS, в свою очередь, предоставляет фундаментальную инфраструктуру для построения распределённых систем управления роботами, позволяя создавать модульные и повторно используемые компоненты. В последние годы ROS развивается в своей версии ROS2, которая улучшает надежность, добавляет поддержку реального времени и расширяет совместимость с различными языками программирования. В этом контексте интеграция с Rust становится особенно актуальной. Одна из главных проблем при взаимодействии Rust с ROS заключается в динамической типизации сообщений, которые передаются между узлами системы. Традиционно для подписки на ROS-топики требуется знать типы сообщений на этапе компиляции, что ограничивает гибкость и требует дополнительных усилий при добавлении новых типов данных или разработке инструментов анализа и визуализации.
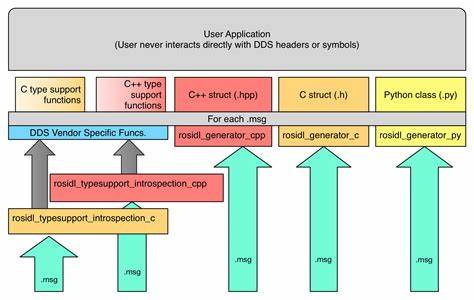
Применение динамической типизации в Rust для ROS открывает новые возможности. Позволяя подписываться на сообщения без предварительного знания их структуры, разработчики могут создавать универсальные инструменты, способные работать с любыми типами данных, предоставленными во время выполнения программы. Этот подход особенно востребован для создания отладочных инструментов, динамических визуализаторов и систем мониторинга, где требуется анализировать и обрабатывать разнообразные данные в реальном времени без необходимости постоянной перекомпиляции кода. Важным шагом к достижению этой цели стало портирование парсера .msg файлов, формата определяющего структуру сообщений в ROS, с Python на Rust.
Благодаря этому удалось воссоздать поддержку анализа сообщений в самом языке Rust, что значительно упрощает работу с динамическими типами. Вместо компиляции сообщений в статические типы, используется представление сообщений как абстрактных синтаксических деревьев, которые затем применяются для десериализации сырых байтовых потоков из ROS-топиков. Это позволяет работать с данными более гибко, при этом сохраняя безопасность и производительность. Другим важным аспектом является способ подписки на топики с динамическими типами. Традиционные библиотеки для ROS2 на Rust, такие как r2r, требуют необходимого знания типов на этапе подписки, что ограничивает их использование в сценариях динамического взаимодействия.
Однако разработка альтернативной библиотеки ros2-client привнесла возможность подписываться на данные как на сырые байты, которые затем можно обработать самостоятельно, используя контекст из парсера .msg. Это позволило сделать шаг к полноценной динамической десериализации и рефлексии в Rust. Рефлексия, в свою очередь, играет ключевую роль в том, чтобы сделать работу с произвольными типами данных удобной. Rust традиционно не поддерживает рефлексию в том виде, как это популярно в динамических языках.
Тем не менее, появление библиотеки bevy_reflect открыло новую эру для динамического взаимодействия с типами. Эта библиотека предоставляет абстрактные типы и механизмы отражения, которые позволяют создавать данные, способные динамически приводиться к строкам, сравниваться, изменяться и визуализироваться в рантайме. В области робототехники это особенно полезно для создания универсальных мониторинговых систем и интерфейсов, где важно иметь возможность работать с любыми сообщениями, не перегружая систему статическими типами. Благодаря интеграции этих технологий команда разработчиков смогла создать визуальные инструменты, позволяющие не только просматривать структуру ROS-системы, но и взаимодействовать с ней в реальном времени. Такие возможности включают вызов сервисов, публикацию сообщений и динамическую десериализацию пришедших данных.
Важным моментом стало решение проблемы запуска и работы без необходимости разворачивать полноценный ROS2-стек на локальной машине. Использование нативной Rust-реализации ros2-client позволяет подключаться к удаленным ROS-системам или работать через контейнеры Docker, значительно упрощая процесс разработки и тестирования. Помимо технических достижений, данное направление работы с Rust, ROS и динамическими типами открывает перспективы для искусственного интеллекта и автономных роботов. Возможность изменять типы и поведение программ в рантайме без остановки и перекомпиляции напоминает концепции горячей замены модулей (HMR), популярные в веб-разработке. Это значит, что робот может адаптироваться к новым условиям или задачам практически на лету, сохраняя текущие подключения и состояние, что критично для длительных и сложных операций.
Также стоит отметить важность производительности в робототехнических приложениях. Несмотря на плюсы динамических типов, чрезмерное использование рефлексии и динамического анализа может негативно сказаться на скорости работы системы. Поэтому разработчики рекомендуют сочетать динамические и статические подходы, компилируя наиболее часто используемые типы статически, такие как векторы, а остальные обрабатывать динамически. Такой баланс позволяет достичь оптимальной производительности и гибкости сразу при разработке, а в дальнейшем позволяет переходить к полностью статической компиляции при подготовке к релизу. Подводя итог, интеграция Rust и ROS с поддержкой динамической типизации является значительным шагом вперед в развитии инструментов и технологий робототехники.
Этот подход не только позволяет создавать более универсальные и мощные инструменты для разработки, отладки и мониторинга, но и открывает дорогу к новым возможностям автономных систем, которые могут адаптироваться и изменяться в процессе работы. Появление и развитие таких библиотек, как r2r, ros2-client, rosmsg и bevy_reflect, вместе со свежими идеями о динамической работе с типами, значительно расширили горизонты разработки на Rust для ROS и заложили основу для будущих инноваций в области робототехники. Современные робототехнические проекты, использующие подобные инструменты и методы, становятся более устойчивыми к изменениям и более гибкими в условиях быстро меняющегося мира. Будущее за системами, которые могут меняться на ходу, оставаться производительными и одновременно безопасными в эксплуатации, и Rust в тандеме с ROS и динамической типизацией – яркий пример такого будущего.