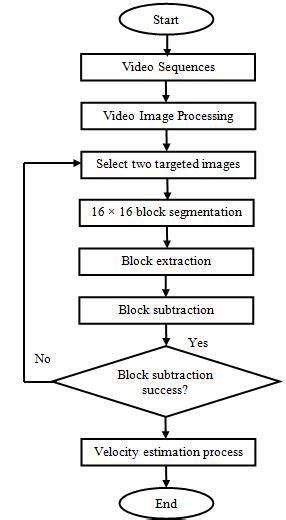
Определение скорости транспортных средств является одной из ключевых задач в области дорожного движения и безопасности. С развитием технологий компьютерного зрения и искусственного интеллекта появилась возможность использовать современные алгоритмы для оценки скорости автомобилей, грузовиков, мотоциклов и другого транспорта. Однако, несмотря на прогресс, данный процесс сталкивается с рядом технических и практических трудностей, особенно в условиях реального мира, когда камера установлена не строго перпендикулярно дороге, а положение и угол съемки постоянно меняются. В данной статье рассмотрим современные подходы к определению скорости транспортных средств, акцентируем внимание на проблемах преобразования пиксельной скорости в реальные километры в час, а также обсудим перспективы автоматизации подобных систем. Одним из фундаментальных инструментов для отслеживания транспортных средств на видео является алгоритм YOLO (You Only Look Once), который позволяет детектировать объекты в режиме реального времени с высокой точностью.
С помощью YOLO можно локализовать транспортное средство на каждом кадре видео, отслеживать его перемещение и рассчитывать скорость в пикселях в единицу времени. Однако непосредственное получение скорости в километрах в час на основе данных в пикселях встречает значительные трудности из-за особенностей перспективы камеры и необходимости точно знать расстояния на дороге. Ключевая сложность заключается в том, что для камер, установленных сбоку дороги и направленных перпендикулярно движению транспортных средств, можно использовать простую линейную зависимость между количеством пикселей и метрами на дороге. Например, если известно, что один пиксель соответствует определенному количеству метров, вычислить реальную скорость становится сравнительно легко. В таких условиях существуют готовые решения, например, в Ultralytics YOLO встроен параметр speed_meter_per_pixel, который позволяет напрямую переводить пиксели в метры с необходимой точностью.
Однако данная методика работает только при строгом соблюдении геометрии съемки, что в реальной жизни встречается довольно редко. Реальная постановка задачи усложняется многими факторами. Камеры часто располагаются под произвольным углом к дороге, съемка ведется с высоты, с автомобиля или смартфона, а транспорт движется по кривой, что усложняет определение масштаба и перспективы. В таких случаях простой коэффициент перевода пикселей в метры становится недостаточным. Чтобы преодолеть этот барьер, некоторые исследователи предлагают построение матрицы преобразования, которая учитывает пространственные искажения, перспективу и положение камеры.
Такая матрица задаёт индивидуальные коэффициенты пересчёта для разных участков изображения, позволяя более точно переводить виртуальную скорость в реальные значения. Одно из наглядных решений подробно рассмотрено в видео, где показана идея постройки такой матрицы вручную. Однако ручное определение и калибровка этой матрицы является трудоёмким и субъективным процессом, что ставит под сомнение долгосрочную реализуемость и применимость подобных решений в массовых условиях. Кроме того, необходимость ручного ввода исходных данных повышает шанс ошибки и снижает автоматизацию. Более того, системы с жёстко закреплёнными параметрами становятся неспособными адаптироваться к динамическим изменениям положения камеры или деформациям изображения, что ограничивает их применение в мобильных, временных или нестандартных сценариях.
В связи с этим обсуждается идея создания алгоритмов, которые способны самостоятельно определять параметры преобразования и масштаба без предварительной настройки пользователем. Такие подходы могут использовать методы компьютерного зрения и машинного обучения для распознавания дорожных разметок, знаков и других известных объектов на дороге, с учётом их стандартных размеров и положений, что даст возможность алгоритму автоматически калибровать пространство изображения. Бесплатное распознавание дорожных элементов и сопоставление с реальными размерами способно существенно повысить точность оценки скорости. Возможные решения включают применение многокамерных систем, в которых несколько камер охватывают участок дороги с разных ракурсов, позволяя формировать трехмерную картину пространства. Благодаря стереозрению можно определить реальные координаты объектов в пространстве и более точно измерить скорость движения.
Другой интересный вариант — использование глубинных камер, которые уже встроены в некоторые современные смартфоны и позволяют получать информацию расстояния напрямую. Интеграция GPS-данных и инерциальных сенсоров, если съемка ведется с мобильного устройства, также может стать дополнительным источником информации для уточнения скорости. Такой многомодальный подход может заметно улучшить общую точность и устойчивость к условиям съёмки. Тем не менее, на пути интеграции и повсеместного применения данных решений стоят вопросы вычислительной сложности, затрат на оборудование и необходимость корректного сбора данных. Современные облачные сервисы и аппаратные ускорители значительно упрощают выполнение сложных вычислений в режиме реального времени, однако требуются дополнительные исследования и оптимизация алгоритмов, чтобы такие решения стали более доступными.
Будущее определения скорости транспортных средств за счёт автоматического калибрования, адаптивных алгоритмов и использования мобильных устройств выглядит многообещающим. Это позволит получить не только качественный мониторинг дорожного движения, но и создать более гибкие системы контроля скорости, которые смогут применяться в разнообразных условиях — от городских улиц до автодорог в сельской местности. В итоге, хотя задача определения скорости транспорта по видео всё ещё обладает рядом нерешённых вызовов, развитие технологий в области компьютерного зрения и искусственного интеллекта открывает новые горизонты. Автоматизация процесса калибровки камеры и точное преобразование виртуальной скорости в реальные значения — ключ к созданию универсальных и эффективных систем мониторинга трафика, способных работать с минимальным вмешательством и адаптироваться к любым сценариям съемки.