В последние годы стремительное развитие робототехники и искусственного интеллекта позволило ученым глубже изучить взаимодействия между живыми организмами и небиологическими агентами. Одним из наиболее удивительных открытий стало наблюдение за тем, как шимпанзе реагируют на поведение андроида — робота с человеческими чертами лица и мимики. Результаты недавнего исследования выявили, что шимпанзе способны проявлять заразительное зевание при наблюдении за зеванием андроида. Это явление редко встречается в научной литературе и имеет глубокие значения для понимания социальных и когнитивных процессов у приматов и возможных их параллелей в робототехнике и человеко-роботных взаимодействиях. Зевота известна многим как естественный рефлекс организма, связанный с усталостью, скукой или потребностью в повышении уровня бодрствования.
Однако, помимо физической функции, зевота проявляет социальный аспект — она способна распространяться от одного индивида к другому, явление, известное как заразительное зевание. У человека, например, наблюдается высокая степень такого феномена, который связывают с эмпатией, мимикрией и социальным сотрудничеством. Шимпанзе, являющиеся нашими ближайшими родственниками в животном мире, также демонстрируют заразительное зевание в присутствии сородичей. Тем не менее, исследования роли роботов в подобных реакциях были ограничены. Последнее исследование проливает свет на способность этих приматов реагировать на зевоту, исходящую от андроида — искусственного агента с человеческими чертами.
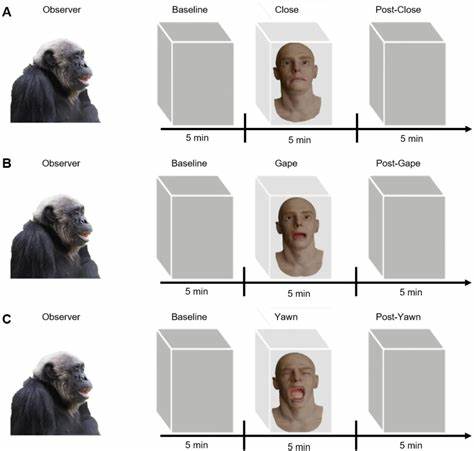
В эксперименте приняли участие 14 взрослых шимпанзе, находившихся в условиях природного вольера, что способствовало максимально естественному поведению. Их знакомили с оборудованием — андроидом высотой около 45 см, оснащённым 33 серводвигателями, способными воспроизводить реалистичные движения лица, включая зевоту. Андроид демонстрировал три состояния: полностью закрытый рот, частично открытый (жевательный зазор) и широко открытый рот при симуляции зевоты. Главным наблюдаемым эффектом стало то, что более половины шимпанзе показывали реакцию — зевали при просмотре зевоты андроида. Интересно, что при частично открытом рте (жевательный жест без значения зевоты) и полностью закрытом рте, зевание у животных практически не возникало.
Таким образом, исследователи выделили градуируемый отклик, где именно насыщенная и выраженная мимика зевоты становилась триггером для зеркальной реакции у шимпанзе. Помимо самих зевков, ученые зафиксировали и другие поведенческие маркеры, связанные с расслаблением и сонливостью — шимпанзе собирали постельные материалы, принимали позу для отдыха и ложились, наблюдая за зевающим андроидом. Этот компонент добавляет новый слой в понимание зевоты как сигнала для перехода в состояние покоя, а не просто как моторного отражения или имитации движения. Данные открывают интригующую возможность — зевота может восприниматься шимпанзе как социальный сигнал, даже если он исходит от небиологического объекта. Это бросает вызов традиционным взглядам на социальные стимулы и говорит о гибкости нейробиологических механизмов восприятия, связывающих поведение гуманоидных роботов с животными.
За счет того, что андроид был новым и незнакомым объектом, реакция шимпанзе не была обусловлена привычкой или социальными связями. Это дает основания предполагать, что корни заразительной зевоты уходят глубоко в эволюцию и связаны скорее с моторной резонансной системой, нежели исключительно с эмпатией или сложными социальными познаниями. Однако по наблюдаемым поведенческим изменениям в позе отдыха можно предположить, что существует также когнитивный компонент — восприятие зевоты как сигнала времени и места для отдыха. Эти открытия имеют важное значение не только в изучении поведения шимпанзе, но и открывают перспективы для человеко-роботного взаимодействия в будущем. Тот факт, что животные реагируют на поведение робота, свидетельствует о возможности создания более интуитивных и естественных интерфейсов общения.
Взаимодействие с андроидами и роботами с человеческим обликом может способствовать развитию новых методов социальной реабилитации животных, улучшению условий их содержания и обучения. Кроме того, понимание того, как роботы влияют на эмоциональные и поведенческие реакции животных, поможет сделать шаг вперед в разработке этичных и эффективных систем коммуникации. С другой стороны, эти исследования стимулируют дискуссии в области философии о том, где проходит граница между биологическим и искусственным в социальном общении. Может ли робот стать полноценным социальным агентом, и каким образом механизмы эмпатии и имитации будут работать в межвидовом и межагентном взаимодействии? Данные эксперименты показывают, что даже небиологический агент способен запускать сложные социальные реакции у наших ближайших родственников. Зевота также воспринимается с позиции возможной координации и синхронизации группового поведения.
Такая синхронизация имеет адаптивное значение — скоординированный отдых или активность позволяет оптимизировать использование ресурсов и повысить общую выживаемость. Следовательно, наблюдение за заразительной зевотой в присутствии андроида подчеркивает роль невербальных сигналов как фундаментальную основу для социальной координации, которая может быть достаточно универсальна и перенастраиваема даже на искусственные стимулы. Стоит отметить, что эксперимент проводился в строгом соответствии с этическими нормами, условия пребывания шимпанзе были максимально приближены к естественной среде, и все действия совершались без воздействия, вызывающего дискомфорт или стресс. Это придает вес исследованиям и подчеркивает важность соблюдения гуманизма в научных изысканиях. Еще одной примечательной деталью является то, что время суток не влияло на частоту зевков и поведение животных, что указывает на то, что реакция была непосредственно связана с наблюдаемым стимулом, а не с внутренними биоритмами.
Для специалистов в области когнитивной этологии, робототехники и психологии эти результаты представляют интерес и открывают новые направления для исследований. Например, можно изучать, насколько другие манипуляции и поведенческие паттерны андроида способны активировать разнообразные реактивные модели у животных. Можно исследовать возможность развития доверия, привязанности и других социальных связей между живыми существами и роботами. Также исследование способствует пониманию эволюционных основ коммуникации, где эмоциональное и моторное заражение играют посредническую роль. Такой подход объединяет данные из нейронаук, поведенческой экологии и искусственного интеллекта.
Это помогает прояснить, каким образом простые механизмы мимикрии и моторного резонанса могут быть основой для сложных социальных и когнитивных процессов, таких как эмпатия и социальное обучение. В заключение, реакция шимпанзе на зевоту андроида подтверждает, что социальное поведение и присутствие инфлюенций отражается на разных уровнях взаимодействия, а само поведение зевания продолжает сохранять свою важность как невербальный коммуникативный сигнал. Подобные открытия служат фундаментом для дальнейшего развития исследований в смешанной реальности, где животные и искусственные агенты смогут выстраивать разнообразные формы общения и взаимопонимания. В будущем подобные междисциплинарные проекты позволят расширить горизонты понимания природы сознания, эмпатии и социального взаимодействия, а также построить более гуманные и эффективные модели интеграции роботов в экосистему жизни.