Современное сельское хозяйство сталкивается с рядом значительных проблем, среди которых дефицит рабочей силы, рост требований к продуктивности и необходимость функционирования в сложных, нестандартных условиях. В таких условиях роботизация отрасли становится ключевым решением. Особенно перспективным направлением является использование мягких робототехнических систем, которые благодаря своей гибкости и адаптивности идеально подходят для деликатных операций, таких как сбор урожая средних и мелких по размеру культур. Важнейшая задача - создать универсальный захватный механизм, который обеспечит надежное удержание плодов и позволит эффективно отделять их от растения, учитывая особенности морфологии, такие как жесткие черешки или педиункулы. Одним из прорывных решений стала разработка модульного софт-гриппера с интегрированным ирисовым механизмом резки и встроенными силовыми датчиками.
Такой комплекс позволяет сочетать бережное манипулирование с точным и автоматизированным отделением плодов без необходимости использования сложных систем визуализации или позиционирования. Основные вызовы аграрной робототехники традиционно связаны с непредсказуемостью внешней среды, перепадами условий, сложностями взаимодействия с чувствительными к повреждениям объектами и необходимостью поддерживать высокую производительность. Классические жесткие роботы зачастую не могут гарантировать требуемый уровень безопасности для продуктов и растений, а также нуждаются в сложном программном обеспечении и дорогостоящем оборудовании для точного позиционирования объектов. В отличие от них, мягкие робототехнические захваты обладают естественной способностью адаптироваться к различным формам и размерам, что крайне важно в сборе фруктов. Однако большинство традиционных софт-грипперов обеспечивает лишь обхват и удержание, не решая задачу отсечения педиункула или фиксированного соединения с растением.
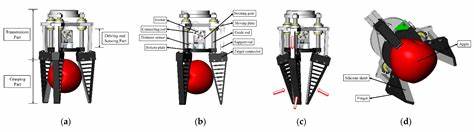
Разработанный модульный софт-гриппер представляет собой инновационное сочетание мягких пневматических актуаторов, оснащенных встроенными механо-оптическими датчиками силы, и уникального ирисового механизма резки, спроектированного для безопасного и эффективного отделения плодов. Ключевая особенность ирисового механизма - его способность самоустанавливать педиункул в центр резательного поля благодаря конструктивным особенностям лопастей, что существенно снижает требования к точности восприятия и позиционирования плодоножки. За счет этого робот способен выполнять операцию резки при минимальных вычислительных ресурсах, значительно упрощая аппаратную и программную составляющую системы. В основе мягких актуаторов лежит использование термопластичного эластомера (TPE), который благодаря своей эластичности и возможности 3D-печати обеспечивает создание сложных, функциональных компонентов с высоким коэффициентом деформации. Процесс 3D-печати позволяет быстро прототипировать и настраивать компоненты под разные задачи и размеры плодов, делая систему максимально гибкой и экономичной.
Встроенные механо-оптические сенсоры, представляющие собой комбинацию инфракрасных диодов и фотодиодов, регулируемых специальной структурой с гиродной внутренней геометрией, позволяют в реальном времени контролировать усилие захвата без дополнительной сложной электроники. Это гарантирует, что плод удерживается надежно, но при этом без повреждений - важнейшее качество для сохранения товарного вида и длительности хранения. Ирисовый механизм, изготовленный из высококачественной нержавеющей стали толщиной 0,5 мм, состоит из трех лопастей с острой режущей кромкой. Конструкция оснащена мотором с редуктором и энкодером, что обеспечивает необходимый крутящий момент для быстрого и точного закрывания лопастей с возможностью мониторинга позиции. Крутящий момент передается через два шестеренных колеса, изготовленных из полиактидного кислоты (PLA), что обеспечивает легкость и точность движения.
Несмотря на компактность, механизм способен эффективно перерезать твердые педиункулы таких культур, как болгарский перец, с усилием порядка 10 Н за 3 секунды. При этом рабочие лопасти остаются скрыты внутри устройства в состоянии покоя, предотвращая случайные повреждения окружающей среды, оператора или самого рисунка растения. Тестирование системы показало высокий потенциал решения. Эксперименты с болгарским перцем продемонстрировали удачное захватывание и отрезание плодоножек при разном исходном позиционировании плодов. Самоцентрировка педиункула врезательный механизм позволила выполнить рез без точного механического позиционирования, значительно упрощая интеграцию с системами восприятия.
Отдельные попытки резки педиункулов баклажана были затруднены из-за большей жесткости материала и частичного высыхания образцов, а также вследствие того, что шестерни и элементы приводной части пока изготовлены из PLA, ограничивающего максимальную нагрузку. В планах на будущее - использование более прочных материалов, например, алюминия, для повышения мощности и надежности конструкции и расширения ассортимента обрабатываемых культур. Важно отметить, что интеграция сенсоров силы в мягкие актуаторы не привела к снижению деликатности захвата и не вызвала повреждений плодов при тестах, что подтверждает высокую функциональность и безопасность технического решения. Возможность измерения усилия в реальном времени открывает перспективы для интеллектуального управления захватом с обратной связью, позволяя адаптироваться к вариациям формы и жесткости фруктов, минимизируя брак и повышая эффективность сбора. Использование 3D-печати как основного метода производства обеспечивает не только снижение затрат, но и простоту тиражирования и модификаций.
Платформа поддерживает модульность, что позволяет менять количество актуаторов, размеры захвата и другие параметры для адаптации к конкретным потребностям хозяйства или сорта. Этот факт делает технологию гибкой и практичной для широкого спектра применений, от мелких фермерских хозяйств до масштабных агрохолдингов. В целом, современный софт-гриппер с силовым датчиком и ирисовым механизмом резки представляет собой многообещающее решение, которое сочетает в себе бережность мягкой робототехники с функциональной универсальностью. Он способен не только надежно захватывать и удерживать плоды, но и выполнять дополнительную функцию - отсекать их от куста, минимизируя необходимость использования сложных систем наведения. Такой подход потенциально позволит значительно повысить скорость и качество автоматизированного сбора урожая, а также снизить себестоимость и требования к внедрению роботов в аграрный сектор.
В будущем планируется интеграция данного гриппера с промышленными роботами и тестирование в реальных полевых условиях, что позволит оценить эффективность и надежность решения на практике для различных культур. Последующая модернизация с использованием более прочных материалов для деталей резки откроет возможности работы с более жесткими плодовыми культурами и повысят масштабируемость технологии. Повышение уровня автономности и усовершенствование алгоритмов управления обеспечит максимальную производительность и минимальные повреждения плодов с целью удовлетворения требований современных рынков и фермерских хозяйств, стремящихся внедрять инновации для конкурентоспособности. Таким образом, развитие мягких захватных механизмов с встроенным управлением усилием и надежным режущим устройством является одним из ключевых направлений цифровой трансформации сельского хозяйства, позволяющим повысить эффективность, устойчивость и автоматизацию систем сбора урожая средних по размеру культур. .





![New Electric Motor Runs Without Metal Coils [video]](/images/310E1500-2D59-429C-9381-D8792E5C7F10)