В природе существует множество удивительных механизмов, позволяющих организмам прочно удерживаться на самых разнообразных поверхностях даже в сложных условиях. Особенно ярко эта способность проявляется у ремор — рыбы, которая умудряется надежно прикрепляться к своим хозяевам под водой, включая акул, черепах и даже китов. Благодаря изучению биологии и анатомии этих существ учёные и инженеры разработали высокотехнологичные устройства, способные имитировать природные принципы сцепления. Такой подход открыл новые горизонты в создании механических подводных клеящих устройств, предназначенных для мягких и динамичных поверхностей, что имеет широкое применение как в медицине, так и в инженерии и биологических исследованиях. Современные подводные клеящие технологии тесно связаны с биомиметикой — областью науки, изучающей и воплощающей в технику принципы живой природы.
Механизмы сцепления ремор отличаются необычной конструкцией: их первый спинной плавник эволюционно преобразовался в присоску с пластинчатыми структурами, которые плотно прилегают к поверхности хозяина. Эта адгезия допускает прикрепление к самым различным мягким тканям, переживающим постоянные движения, изменения влажности и рН среды, как, например, в желудочно-кишечном тракте животных. Разработка Mechanical Underwater Soft Adhesion System (MUSAS) стала прорывом в этой области. Это миниатюрное механическое устройство, повторяющее сложную структуру и функциональность присоски ремор, способно автономно и надёжно прикрепляться к мягким подводным поверхностям даже в условиях высоких температур, изменяющегося состава жидкости и других экстремальных факторов. В основе MUSAS лежат биомеханические принципы многоотсекного вакуумного сцепления и механического блокирования, которые обеспечивают устойчивую фиксацию при разной степени шероховатости, мягкости и подвижности поверхности.
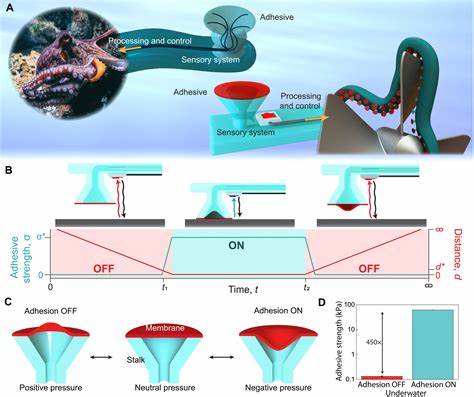
Ключевым аспектом эффективности таких устройств является их способность адаптироваться к движениям и изменению структуры ткани. За счёт многокомпартментальной конструкции устройство последовательно интегрирует несколько независимых присасывающихся элементов, что обеспечивает сохранение сцепления даже при частичной потере контакта некоторых из них. Активное раскрытие и изменение углов положения сегментов дополнительно повышает область прилегания и интенсивность «мокрого» вакуума, создавая прочное, надёжное прилегание. Разработка MUSAS сопровождается комплексным изучением гидродинамики, физики контакта и биологии материала, в частности механических и топографических характеристик тканей, к которым оно прикрепляется. За счёт проведения компьютерного моделирования, микроскопического анализа и испытаний на различных биомоделях удалось оптимизировать дизайн, достичь рекордного показателя силы адгезии относительно веса устройства и обеспечить сохранение функционала долгое время, что особенно важно при применении в живых организмах.
В медицине такие механические адгезионные системы открывают новые возможности для мониторинга и лечения заболеваний, связанных с внутренними мягкими тканями. Например, нарушение пищеварительной функции — гастроэзофагеальная рефлюксная болезнь (ГЭРБ) — требует длительного и точного наблюдения за состоянием пищевода. Благодаря возможности длительной надёжной фиксации в слизистых оболочках через минимально инвазивный доступ, MUSAS может интегрироваться с биосенсорами, прочно удерживаясь в зоне интереса без дискомфорта для пациента. Дополнительный перспективный сценарий – разработка систем для доставки лекарственных препаратов и биотерапевтических агентов непосредственно в просвет и ткани желудочно-кишечного тракта. Благодаря способности проникать в поверхностные слои тканей с помощью микроигольчатых структур, устройства на базе MUSAS значительно повышают биоусвоение крупных молекул и нуклеиновых кислот, включая мРНК, открывая путь для новых эффективных вакцин и лекарств, которые раньше нельзя было применить пероральным способом.
С точки зрения материаловедения, создание таких устройств привело к использованию композитов на базе силиконовых эластомеров и сплавов с эффектом памяти формы (например, нитинола), позволяющих при повышении температуры тела автоматически изменять форму отдельных элементов для активации крепления. Это значительно упрощает процедуру введения и дальнейшей фиксации, делая устройство полностью пассивным и автономным. Важным моментом стало исследование динамики сцепления в условиях движения внутренностей и воздействия физиологических сил, таких как перистальтика и изменение объёма тканей. Эксперименты на животных моделях — от рыб до свиней, биомоделей близких человеку — показали, что устройства не только прочно удерживаются в нужном месте, но и не вызывают повреждений слизистых оболочек и других тканей, не нарушают обычное поведение и физиологию. Активное изучение биософты и особенностей поверхности мягкой ткани позволило также понять, что эффективность прикрепления зависит не только от физической конструкции, но и от микрорельефа, влажности, химического состава и даже наличия биологических покрытий, таких как слизь.
Эти факторы учитываются при разработке эластичных и гидрофобных покрытий для снижения износа и повышения долговечности. В промышленности и робототехнике подводные механические клеящие устройства могут быть востребованы для манипуляций с мягкими предметами в воде, позволяя роботам надёжно захватывать объекты, исследовать морские экосистемы или проводить ремонтные работы на подводных структурах. При этом возможность адаптироваться к неровным и движущимся поверхностям существенно расширяет сферы применения. Перспективы развития такого рода технологий включают интеграцию девайсов с различными сенсорами, контроллерами и системами связи, что позволит создавать интеллектуальные платформы для дистанционного мониторинга и управления. Улучшения в материалах, в частности внедрение биосовместимых и биоразлагаемых компонентов, будут способствовать использованию в более широком спектре медицинских задач без необходимости хирургического извлечения устройств.
Резюмируя, Mechanical Underwater Soft Adhesion System и аналогичные решения, вдохновленные природой и основанные на междисциплинарном подходе, представляют собой революционные инструменты в области подводной адгезии. Их уникальные свойства позволяют преодолеть ограничивающие факторы традиционных клеящих составов и механических крепежей, что открывает новые горизонты для инженерных разработок и клинических приложений. В ближайшие годы можно ожидать появления новых поколений подобных технологий, оптимизированных под разнообразные задачи, от устойчивого крепления в сложных условиях окружающей среды до персонализированных медицинских устройств для точечного лечения и мониторинга.







