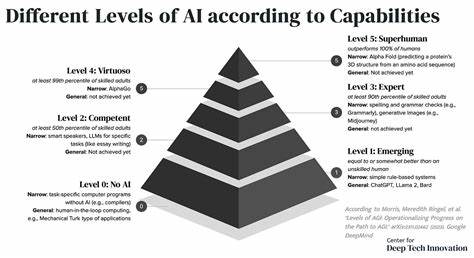
В современную эпоху развития искусственного интеллекта одна из самых амбициозных целей — создание искусственного общего интеллекта (AGI). Этот уровень ИИ способен решать широкий спектр задач, проявляя гибкость и глубину понимания, сопоставимые с человеческим интеллектом. Однако добиться устойчивого и эффективного обучения моделей для приближения к AGI — крайне сложная задача, сталкивающаяся с множеством ограничений существующих методов. В этой области значительный прорыв обещает новый подход под названием Predictive Integrity Learning Framework (PILF), основанный на интегративной когнитивной теории и динамическом подходе к обучению моделей. PILF предлагает уникальную методологию, которая может стать фундаментом для будущих систем AGI с непрерывным самообучением и адаптивностью.
Истоки и философия PILF заложены в концепции Integrated Predictive Workspace Theory (IPWT), теоретической модели, которая рассматривает процесс обучения как непрерывное взаимодействие между предсказательной моделью и динамической оценкой данных в реальном времени. В основе PILF лежит идея отказа от традиционных фиксированных гиперпараметров, таких как постоянная скорость обучения, в пользу адаптивных стратегий, способных учитывать «сюрприз» или неожиданность каждого поступающего пакета данных. Это позволяет модели не просто механически обрабатывать информацию, а динамически перестраивать свои внутренние процессы, фокусируясь на наиболее значимых и полезных для обучения элементах и минимизируя влияние повторяющихся или менее информационно насыщенных данных. Технически PILF реализуется с помощью архитектуры на основе Mixture-of-Experts (MoE) — модели, состоящей из множества специализированных экспертов, каждый из которых обучается решать определённые подзадачи. Важной инновацией здесь становится использование метаобучающего механизма, ответственного за маршрутизацию входных данных между экспертами.
Этот механизм реализован в виде GatingTransformer — трансформера, который по заданному входному представлению выбирает наиболее релевантных экспертов из множества для обработки конкретной задачи. Такое разделение обучения на два параллельных процесса — обучение самих экспертов и обучение стратегии маршрутизации — обеспечивает стабильную оптимизацию политики и предотвращает застой в обучении. Особое внимание PILF уделяет понятию Surprise, метрике, отражающей степень неожиданности полученного наблюдения для модели. При помощи PI_Calculator вычисляются текущие показатели, которые в свою очередь управляют выбором минимального количества экспертов для обновления в процессе обратного распространения ошибки. Этот подход, называемый SurpriseMinKStrategy (SMK), направлен на эффективную концентрацию ресурсов модели, обновляя только тех экспертов, чей вклад действительно необходим для улучшения результатов.
Для максимизации эффективности обучения высокозначимые события маршрутизации с высоким уровнем неопределённости сохраняются в специальном RoutingExperienceBuffer — буфере опыта, который используется для последующего обучения gating-механизма. Архитектурно PILF использует VisionTransformer в качестве базового компонента для извлечения признаков из входных данных. Экспертный слой представлен GaussianMoELayer, в котором каждый эксперт моделируется с помощью параметров нормального распределения, что позволяет гибко отображать знания в различных доменах и ускоряет адаптацию к новым задачам. Такая комбинация различных механизмов представляет собой мощный и гибкий инструмент, способный не только эффективно обучаться, но и обеспечивать постоянный самоконтроль качества через измерение интегрированной предсказательной целостности (Predictive Integrity). Среди преимуществ описанного фреймворка ключевым является динамическое изменение количества активируемых экспертов в зависимости от сложности задачи и уровня Surprise.
Благодаря этому нейросеть способна экономить вычислительные ресурсы при выполнении простых операций и в то же время мобилизовать все необходимые мощности для сложных проблем. Интересно, что разработчики PILF нацелены на интеграцию проверенных современных методов динамической маршрутизации, предложенных в недавно опубликованных исследованиях, что подтверждает инновационный и совместный характер развития технологии. Ещё одно перспективное направление в PILF — внедрение динамического расписания обучения. Система анализирует исторические изменения точности и показатели предсказательной целостности, чтобы оптимизировать график обучения и обеспечить максимальный прогресс по всем задачам. Такой подход также позволяет мне модели «переключаться» между задачами, когда предыдущие уже освоены (grokking), и больше концентрироваться на задачах, требующих доработки, что отражает принципы когнитивной эффективности и саморегуляции, аналогичные человеческим стратегиям обучения.
Практическая реализация PILF доступна через открытый репозиторий на GitHub, где представлены необходимые исходные коды, инженерная документация и руководства по установке и использованию. Несмотря на то, что проект требует наличия предварительно установленных библиотек, таких как PyTorch, описание состоит в том, что рамки обучения легко настраиваются под конкретные задачи и аппаратные условия пользователя. Это значительно упрощает внедрение технологии исследователями и разработчиками в области ИИ. Отдельно стоит отметить, что PILF лицензирован на условиях AGPLv3, что подразумевает открытость и свободу использования с обязательством распространения изменений и модификаций под той же лицензией. Такой подход содействует развитию сообщества, позволяя исследователям быстро обмениваться новыми идеями и совместно постепенно приближаться к реализации AGI с помощью коллективных усилий.
В контексте глобального развития технологий, PILF демонстрирует синтез бионических и когнитивных концепций с передовыми достижениями машинного обучения. Особенность его в способности имитировать функции, схожие с человеческим сознанием, включая активное предсказание и динамическую адаптацию поведения при обучении. Это наводит на мысли о грядущих этапах, когда методы подобного рода позволят создавать интеллектуальные системы, обладающие не только технической мощью, но и внутренним самосознанием процесса обучения и самокоррекции. Кроме того, PILF помогает решать традиционную проблему катастрофического забывания, свойственную многозадачным и непрерывным системам обучения. За счёт защиты стратегий маршрутизации и селективного обновления экспертов система сохраняет приобретённые знания, что важно для надежной работы и долгосрочной адаптации к изменяющимся условиям среды.
Таким образом, Predictive Integrity Learning Framework нельзя недооценивать — это не просто новая методика, а комплексный прогрессивный инструмент, открывающий путь к действительно интеллектуальным системам будущего. Внедрение таких передовых концепций станет основой для создания AGI, способного к постоянному рефлексивному обучению, эффективной адаптации и глубокому пониманию окружающего мира. На сегодняшний день, когда индустрия искусственного интеллекта быстро развивается, PILF предлагает свежий взгляд и работает как катализатор для исследований и разработок в области общего интеллекта. Стремясь к динамическим стратегиям вместо статичных правил, он оправдывает надежды на построение интеллекта, который не только решает задачи, но и по-настоящему понимает и прогнозирует окружающую реальность, приближая человечество к эре умных машин с когнитивной зрелостью.