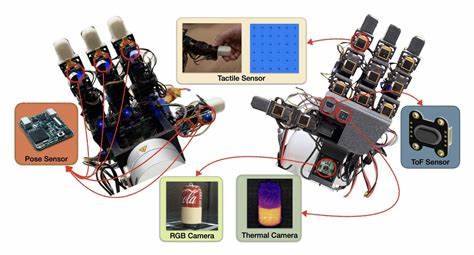
В мире робототехники развитие автономных и многофункциональных манипуляторов считается одной из ключевых задач. Роботизированные руки, способные имитировать и даже превосходить человеческие возможности по манипуляциям, лежат в основе прогресса в таких областях, как промышленная автоматизация, медицина, исследование окружающей среды и сервисные роботы. Одним из последних достижений в этой области является разработка робота MOTIF — многофункциональной руки, оснащённой мультимодальными сенсорами, включающими в себя тепловые камеры, инерциальные измерительные устройства и силовые датчики. Такая комплексная сенсорика кардинально расширяет возможности взаимодействия робота с окружающей средой и делает его незаменимым инструментом для точных и безопасных манипуляций. Основой для MOTIF стала платформа LEAP Hand, которая уже была признана как универсальная и простой в производстве роботизированная рука.
Однако разработчики решились пойти дальше, интегрировав в систему высокоточные и разнообразные сенсоры, что позволило получить не просто манипулятор, а настоящий сенсорный комплекс для многогранного восприятия объектов и окружающей среды. Ключевым элементом MOTIF является тепловая камера. Возможность измерять температуру объектов в режиме реального времени открывает новые горизонты для безопасного взаимодействия. К примеру, робот может аккуратно захватывать горячие или холодные предметы, учитывая температурные параметры в момент соприкосновения. Это критически важно в промышленных условиях, где контакт с нагретыми деталями может быть опасным, а ошибки в обращении ведут к повреждениям оборудования или сами пораниться манипулятору.
Сочетание тепловой камеры с глубинным сенсором, также интегрированным в руку, позволяет проводить точную трёхмерную реконструкцию сцены и объекта. Таким образом, робот не только видит форму и положение предмета, но и получает представление о его тепловом профиле. Это значительно улучшает возможности по анализу и принятию решений, например в задачах сортировки, ремонта или контроля качества изделий. Другой важной составляющей являются инерциальные измерительные устройства (IMU), которые фиксируют движение и ориентацию робота. Они позволяют оценивать силу и направление воздействия, а также устойчивость руки в пространстве при выполнении манипуляций.
Благодаря IMU, MOTIF может точно корректировать свои движения, обеспечивая плавную и безопасную работу даже в условиях нестабильности или при необходимости тонкой настройки захвата. Силовые датчики, интегрированные прямо в пальцы и суставы, обеспечивают чувствительность к механическим воздействиям. Это качество приближает робота к человеческому уровню манипуляций, когда чувствительность к силе захвата помогает не сдавить хрупкие объекты и удерживать грузы разного веса. Более того, способность робота определять массу и прочностные характеристики предмета основывается именно на этих данных, что является несомненным плюсом по сравнению с системами, которые используют только визуальную информацию. Система MOTIF доказала свою эффективность в экспериментальных условиях.
В частности, одно из испытаний включало в себя захват объектов с одинаковым внешним видом, но разной массой. Традиционные роботизированные руки, полагающиеся исключительно на визуальные датчики, в таких условиях испытывают сложности с идентификацией. MOTIF же успешно различает такие предметы, используя информацию с силовых и инерциальных сенсоров, расширяя функционал робота и повышая точность выполнения задач. Другой эксперимент касался применения тепловых данных для контроля безопасности при работе с нагретыми объектами. Робот успешно мог мониторить температуру окружающих предметов и адаптировать алгоритмы захвата, минимизируя риск повреждений как для себя, так и для рабочей среды.
Такая особенность особенно востребована в промышленности и сфере обслуживания, где контакт с элементами, обладающими разной температурой, встречается регулярно. Кроме технических характеристик, важным преимуществом MOTIF является его относительно низкая стоимость. Стоимость изготовления на уровне менее 4000 долларов делает платформу доступной для многих исследовательских лабораторий и компаний, заинтересованных в развитии робототехнических систем с высокими сенсорными способностями. Также проводится активная работа над улучшением воспроизводимости и простоты сборки, что способствует быстрому внедрению технологии в практику. Современные требования к роботам включают способность не просто выполнять запрограммированные движения, но и понимать окружающую среду через различные сенсорные каналы, принимать адаптивные решения и работать в условиях неопределённости.
В этом смысле проект MOTIF является важным шагом навстречу созданию действительно интеллектуальных и чувствительных роботов, способных взаимодействовать с объектами на глубоком уровне, намного превосходящем возможности классических роботизированных рук. Развитие подобных технологий имеет потенциал для революционизации множества отраслей. В медицине точный и бережный захват инструментов и тканей с учётом температуры и силовых характеристик крайне важен для робот-ассистированных операций. В промышленном производстве повышение безопасности и эффективности обработки трудностей и разнообразных материалов напрямую зависит от качества сенсорной обратной связи. Сельское хозяйство и логистика также выигрывают от роботов, способных распознавать нюансы объектов, их температуру, вес и особенности поверхности.
Кроме того, расширение сенсорики стимулирует развитие алгоритмов искусственного интеллекта и машинного обучения, которые могут использовать получаемые многомодальные данные для создания сложных моделей поведения. Это открывает двери для инноваций в области автономных роботов и их взаимодействия с человеком в реальном времени. Таким образом, интеграция тепловых, инерциальных и силовых сенсоров в единую роботизированную руку MOTIF не только повышает качество и надёжность манипуляций, но и расширяет границы функциональности роботов. Такие решения закладывают фундамент для следующего поколения роботов, которые смогут выполнять сложные задачи в разнообразных сферах, эффективно взаимодействовать с окружающей средой и обеспечивать безопасность и точность на уровне современной инженерной мысли. С появлением и распространением платформ, подобных MOTIF, мир робототехники движется к новым рубежам, где умение воспринимать мир во всех его аспектах становится ключевым фактором успешного применения роботов в реальной жизни.
В ближайшем будущем можно ожидать более широкого применения таких многофункциональных и доступных технологий, что будет способствовать дальнейшему прогрессу и инновациям во многих направлениях науки и техники.







